隨著我國海洋油氣事業(yè)的不斷發(fā)展,海底管道鋪設(shè)不斷增多,海底管道事故發(fā)生頻率和危害程度也進(jìn)一步增加[1],海底管道泄漏的風(fēng)險來源包括多個方面,主要包括因地質(zhì)災(zāi)害導(dǎo)致海底管道失穩(wěn),海底管道埋設(shè)不當(dāng)導(dǎo)致管線懸空,海底地形地貌復(fù)雜引起的管道變形,以及海底砂礫運(yùn)動對管道造成磨損等。因此,非常有必要探明現(xiàn)有管道埋設(shè)和出露狀態(tài)及位置,探測并研究海底管道區(qū)地形地貌對管道的影響。常用的探測 *** 主要包括多波束測深系統(tǒng)、側(cè)掃聲納、淺地層剖面儀等[2-3]。
目前,合成孔徑聲納(synthetic aperture sonar,SAS)作為一種先進(jìn)的水下探測成像技術(shù)已成為國際上的研究熱點(diǎn)。該技術(shù)具有大范圍高分辨率成像能力和對沉底、半掩埋和掩埋目標(biāo)的探測能力,在軍事和民用領(lǐng)域都具有廣泛的應(yīng)用前景,如海底水雷或其他危險物體等軍事目標(biāo)的探測和識別,海底測繪、水下沉船搜尋等[4]。本文著重論述該技術(shù)在海底管道探測方面的應(yīng)用情況和存在的問題,探討其在這一方面的應(yīng)用潛力。
二、SAS基本原理和研究進(jìn)展
⒈ 基本原理

添加微信好友, 獲取更多信息
復(fù)制微信號
合成孔徑聲納技術(shù)其基本原理是利用小孔徑聲納基陣沿空間勻速直線運(yùn)動來虛擬大孔徑聲納基陣,在運(yùn)動軌跡的順序位置發(fā)射并接收回波信號,根據(jù)空間位置和相位關(guān)系對不同位置的回波信號進(jìn)行相干疊加處理,從而形成等效的大孔徑,獲得沿運(yùn)動方向的高分辨率[4-5]。
對聲納系統(tǒng)而言,發(fā)射陣孔徑越大,對目標(biāo)的方位分辨率越高,但實(shí)際上不可能無限制的增大發(fā)射陣尺寸,因此真實(shí)孔徑聲納的目標(biāo)分辨率是相當(dāng)有限的,而且真實(shí)孔徑對于遠(yuǎn)距離目標(biāo)的方位分辨率很差。要想提高分辨率就要提高信號的發(fā)射頻率,而信號的衰減隨頻率的增大而增大,就需要用更大的發(fā)射功率才能獲得更遠(yuǎn)距離的傳輸[6]。針對這些問題,如果用真實(shí)的小孔徑聲納運(yùn)動等效的構(gòu)成一個大孔徑聲納,則可以提高目標(biāo)方位分辨率。使用小孔徑在許多方位向位置處發(fā)射和接收信號,來獲得一個更大孔徑,從而對海底的每個像素成像,最終形成整個海底的圖像[6-7]。
根據(jù)其基本原理,SAS主要具有三個特點(diǎn):①具有很高的橫向空間分辨率,并且分辨率與聲納的工作頻率和作業(yè)距離無關(guān),而僅僅取決于基陣的物理孔徑長度;②可以在低頻工作,具有一定的穿透性,可以探測海底埋藏目標(biāo);③在分辨率相等的條件下,工作效率要高于側(cè)掃聲納[4-6]。
⒉ 研究進(jìn)展
SAS的原理研究始于20世紀(jì)60年代,美國Raytheon公司于1967年提出SAS可行性報告,Walsh于1969年申請了之一個SAS專利,但當(dāng)時主流觀點(diǎn)的質(zhì)疑使得SAS的發(fā)展受阻,直到合成孔徑雷達(dá)的成功再次推動了SAS的發(fā)展[5]。從20世紀(jì)90年代起,澳洲、歐洲、北美國家先后研制出SAS樣機(jī)、軍用機(jī)和商用機(jī),性能不斷提高,作用距離從幾十米、幾百米發(fā)展到十幾千米甚至更遠(yuǎn),分辨率則從米、分米提高到厘米級[4]。近年來,SAS商用機(jī)也逐漸進(jìn)入市場,商用產(chǎn)品主要包括法國IXSEA公司的SHADOWS、法國Thales公司的T-SAS、美國EdegeTech 4400-SAS、美國Applied SignalTechnology公司的ProSAS60、挪威FFI公司的SENSOTEKSAS、挪威Kong *** erg公司的HISAS?以及加拿大Kraken公司的MINISAS等。
我國的SAS研究始于1997年,在國家高技術(shù)研究發(fā)展計(jì)劃的支持下,中科院聲學(xué)所、中船重工715所等國內(nèi)十幾家科研院所和高校先后開始進(jìn)行SAS成像研究,經(jīng)過多年的發(fā)展,不僅在SAS理論及關(guān)鍵技術(shù)方面取得了很大進(jìn)展,而且研制的樣機(jī)通過湖試、海試等一系列試驗(yàn),達(dá)到了國際同步水平[4-5,8]。中科院聲學(xué)所在世界上首次研制完成了同時具備雙側(cè)雙頻實(shí)時成像能力的雙頻合成孔徑聲納工程樣機(jī),通過高低頻圖像的實(shí)時對照,可以顯著提高對掩埋和半掩埋目標(biāo)的探測能力[8]。在市場化方面我國蘇州桑泰海洋儀器研發(fā)有限公司的高頻、低頻合成孔徑聲納也開始進(jìn)入市場[9]。
三、SAS在海底管道探測方面的應(yīng)用進(jìn)展
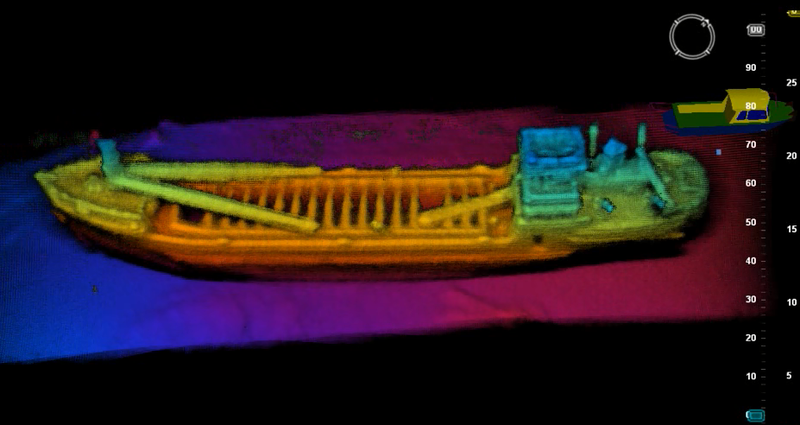
SAS主要用于水下地形地貌勘測、小目標(biāo)搜索、水下構(gòu)筑物調(diào)查、石油開采、水下考古等[4-5,7]。近年來,國內(nèi)外的研究人員與儀器設(shè)備公司也開始探討SAS在管道及其周邊地形地貌探測方面的應(yīng)用,挪威的Kong *** erg Maritime和Norwegian Defence ResearchEstablishment共同研發(fā)了HISAS1030型SAS,并將其安裝在HUGIN1000-MR AUV上,用于水下目標(biāo)的探測[7]。HISAS1030型SAS的主要技術(shù)指標(biāo):更大范圍200m(@2m/s),距離向成像分辨率3cm,沿航跡方向成像分辨率3cm,測繪效率2km2/h[7]。圖1和圖2分別是2010年在美國圣迭戈外海和2009年在挪威西海岸海域?qū)5坠艿兰爸苓叺匦蔚孛驳奶綔y成像結(jié)果,圖像不僅清晰的反映了海底管道的位置、大致狀態(tài),以及周邊海底地形地貌狀況,而且通過深入解析,可以獲得管道狀態(tài)的細(xì)節(jié)信息[7,10-11]。如,測量SAS與管道的距離、工作高度和管道陰影的長度就可以計(jì)算出管道相對于海底的高度;對于半掩埋的管道,則可采用雙側(cè)掃測的方式,利用聲波入射角度計(jì)算管道出露部分的更大寬度[10]。另外,圖1中SAS對于管道旁邊的線繩也能夠清晰成像,顯示了其對小目標(biāo)的成像能力,圖2則清晰反映了管道被礫石覆蓋的狀況。
在海底管道探測中的應(yīng)用進(jìn)展(轉(zhuǎn)載)")
在海底管道探測中的應(yīng)用進(jìn)展(轉(zhuǎn)載)")
2010年中科院聲學(xué)所在渤海埕北油田開展了雙頻合成孔徑聲納工程樣機(jī)海試。該工程樣機(jī)指標(biāo)為測繪帶寬600m,距離向成像分辨率優(yōu)于0.02m,沿航跡方向成像分辨率優(yōu)于0.05m,對尺度0.2m的目標(biāo)可清晰成像[8]。對海底掩埋管線的探測成像結(jié)果見圖3,低頻SAS對海底掩埋管線清晰成像,高頻SAS對海底面的掃測結(jié)果則顯示了管線掩埋后留下的痕跡,進(jìn)一步證實(shí)了低頻SAS的探測結(jié)果。
在海底管道探測中的應(yīng)用進(jìn)展(轉(zhuǎn)載)")
還有研究表明,SAS對于線繩、塑料等聲學(xué)阻抗較大難以探測的非金屬材料也能夠很好的成像[7,10-11]。隨著材料科學(xué)的發(fā)展,海底管線的材質(zhì)也在探索向抗壓、耐腐蝕、耐磨損的非金屬材料發(fā)展,SAS成像技術(shù)也為解決非金屬管線的探測問題提供了一種潛在的 *** [12]。
牟健等將SHADOWS合成孔徑聲納系統(tǒng)與EdgeTech2400側(cè)掃聲納、SeaBat8150深海多波束系統(tǒng)和SIS-3000深拖系統(tǒng)(拖體包括高分辨率測深側(cè)掃聲納和淺地層剖面儀)進(jìn)行了海上對比試驗(yàn)[13-14]。結(jié)果表明,SAS在圖像分辨率、成圖效果、對目標(biāo)物定位精度和圖像鑲嵌效果等方面均優(yōu)于傳統(tǒng)側(cè)掃聲納,深海多波束系統(tǒng)可以獲取精度很高的大范圍水深數(shù)據(jù),但在地形地貌的分辨率探測方面沒有優(yōu)勢[14];SAS的測量精度和分辨率比深拖高,但深拖可以探測海底以下的淺地層結(jié)構(gòu),而試驗(yàn)使用的SAS則沒有這個功能[13]。實(shí)際工作時,往往需要先進(jìn)行多波束測量,了解工作海域的海底地形地貌,再選擇合適的設(shè)備進(jìn)行精細(xì)測量[15-16]。
2013年起國家海洋局北海海洋技術(shù)保障中心聯(lián)合蘇州桑泰海洋儀器研發(fā)公司等12家單位開展了海洋公益性行業(yè)科研專項(xiàng)“海底管道探測技術(shù)集成及風(fēng)險評估技術(shù)研究與示范應(yīng)用”項(xiàng)目的研究工作,擬建立一套以雙頻合成孔徑聲納技術(shù)為主的多功能高效海底管道和地形地貌探測系統(tǒng),實(shí)現(xiàn)對海底管道的高效、高分辨率探測。
四、SAS 在實(shí)際應(yīng)用中存在的問題
從SAS成像原理來看,SAS是將勻速運(yùn)動的小尺寸基陣等效為大尺寸基陣以提高目標(biāo)方位分辨率的,其成像模型包括三方面的假設(shè):①忽略介質(zhì)擾動,聲速保持恒定,信號沿一條直線傳播,傳播延時正比于目標(biāo)距平臺的距離;②假定每個目標(biāo)的復(fù)反射率穩(wěn)定,不隨視角不同而改變;③假定SAS平臺在發(fā)射和接收信號時是靜止的[6]。
然而,實(shí)際應(yīng)用時,這種成像方式受到載體運(yùn)動軌跡誤差及介質(zhì)起伏的嚴(yán)重影響[4,6]。首先,風(fēng)浪及船舶操縱等因素會造成拖體偏離理想直線航跡,由于運(yùn)動誤差而對SAS成像產(chǎn)生影響。其次,SAS要想獲得較高分辨率和較遠(yuǎn)作用距離,就必須降低載體速度,但低速又很難保證SAS載體沿航跡前進(jìn)。再者,SAS載體速度與聲速不匹配,當(dāng)SAS接收信號時,載體已經(jīng)運(yùn)行了一段距離,從而造成信號處理困難。為解決這些問題,研究者采用了一系列的信號處理措施。例如,采用高穩(wěn)定度的載體作為SAS平臺,以及采用運(yùn)動補(bǔ)償措施,來消除或者抑制運(yùn)動誤差;采用多子陣SAS解決SAS速率問題,采用“停-走-停”模式或者精確計(jì)算收放時延內(nèi)陣列的運(yùn)動的 *** ,解決收放不共點(diǎn)問題等。但海洋水聲環(huán)境的復(fù)雜性仍舊是制約SAS成像質(zhì)量進(jìn)一步提高的關(guān)鍵因素,仍需要不斷的研究探索。
另外,研究也發(fā)現(xiàn),作業(yè)方式的不同對于成像結(jié)果也有一定的影響。2009年HISAS 1030型SAS在挪威西海岸海域進(jìn)行的探測應(yīng)用中,為獲得更加全面準(zhǔn)確的成像結(jié)果,研究者采用了平行管道雙側(cè)探測和垂直管道探測兩種方式,將兩種成像結(jié)果進(jìn)行比較卻發(fā)現(xiàn),兩種方式獲得的管道形狀信息有所差異[10]。究其原因大致有三方面:①采用雙側(cè)探測時由于兩側(cè)的探測高度不同,聲波反射高度不同,引起的干涉作用或者管道峰值探測誤差導(dǎo)致反射信號的拖尾效應(yīng);②側(cè)向探測時沒有接收到管道頂部的反射信號;③側(cè)向探測時海底表面的反射作用對成像結(jié)果產(chǎn)生較大影響。
因此,SAS技術(shù)的深入發(fā)展還需要進(jìn)一步完善SAS信號處理 *** ,更多的掌握水聲環(huán)境復(fù)雜性對信號的影響規(guī)律,并且不斷開展海上試驗(yàn)以探索更科學(xué)合理的操作 *** 。對于用戶來講,SAS是一種全新的技術(shù),在實(shí)際工作的應(yīng)用中,面臨著系統(tǒng)操作仍需積累經(jīng)驗(yàn)、系統(tǒng)功能有待熟悉和挖掘、圖像后處理 *** 需要學(xué)習(xí)等問題[17]。對于新上市的商業(yè)機(jī)來說,有目的針對性的系統(tǒng)設(shè)計(jì)和集成 *** ,以及應(yīng)用便捷性和用戶友好性則是生產(chǎn)廠家不容忽視問題,現(xiàn)階段高昂的價格也是制約SAS推廣應(yīng)用的一個重要因素。
五、結(jié)束語
SAS技術(shù)發(fā)展至今,已步入市場化進(jìn)程,主要應(yīng)用于水下地形地貌勘測、小目標(biāo)搜索、水下構(gòu)筑物調(diào)查、石油開采、水下考古等方面,顯示出在高精度探測方面的優(yōu)勢。然而,該技術(shù)在海底管道探測方面的應(yīng)用還處于起步階段,受海洋水聲和動力環(huán)境的影響,在圖像處理、作業(yè)方式,甚至SAS載體選擇等方面仍需要進(jìn)行深入研究。如果能進(jìn)一步克服海洋環(huán)境的影響,充分發(fā)揮該技術(shù)在原理上的獨(dú)到特點(diǎn),相信其在海底管道探測方面的應(yīng)用前景不可低估。特別是當(dāng)高低雙頻SAS進(jìn)入市場后,可以大幅度提高海底管道探測的效率和準(zhǔn)確度,在海底管道維護(hù)管理、溢油應(yīng)急事件處理等方面發(fā)揮重要作用。
參考文獻(xiàn):
[1]方娜,陳國明,朱紅衛(wèi),等.海底管道泄漏事故統(tǒng)計(jì)分析[J].油氣儲運(yùn),2014,33(1):99-103.
[2]周興華,姜小俊,史永忠.側(cè)掃聲納和淺地層剖面儀在杭州灣海底管線檢測中的應(yīng)用[J].海洋測繪,2007,27(4):64-67.
[3]丁繼勝,董立峰,唐秋華,等.高分辨率多波束聲納系統(tǒng)海底目標(biāo)物檢測技術(shù)[J].海洋測繪,2014,34(5):62-71.
[4]孫寶申,張春華,黃海寧,等.合成孔徑聲納成像技術(shù)及應(yīng)用前景[C]//2005年全國海洋高新技術(shù)產(chǎn)業(yè)化論壇論文集.海口.2005:219-225.
[5]張春華,劉紀(jì)元.(第二講)合成孔徑聲納成像及其研究進(jìn)展[J].物理?2006,35(5):408-413.
[6]田豐.合成孔徑聲納聚焦成像算法研究[D].武漢:武漢理工大學(xué),2009.
[7]Hansen,RE.Introductionto Synthetic Aperture Sonar[M].Sonar Systems,N.Kolev,Editor.2011,InTech.
[8]王宏.合成孔徑聲納系統(tǒng)研制[M]//中國海洋年鑒編纂委員會,中國海洋年鑒.北京:海洋出版社,2011.
[9]王培剛.海洋高新技術(shù)裝備選購指南——海底探測類[M].北京:海洋出版社,2013.
[10]S?b?,TO,Callow,HJ,Hagen,PE. Pipeline inspection with synthetic aperture sonar[C]//Proceedingsof the 33th Scandinavian Symposium of Physical Acoustics,2010:1-6.
[11]Hansen R E,SaeboslashT O,Callow H J,etal.Interferometric Synthetic Aperture Sonar in Pipeline Inspection[C]//OCEANS2010 IEEE-Sydney.2010:1-10.
[12]Leighton,TG,Evans,RCP.The detection by sonar of difficulttargets (including centimetre-scale plastic objects and optical fibres) buriedin saturated sediment[J].Applied Acoustics,2008,69(5):438-463.
[13]牟健,姜峰,賴新云.深海多波束系統(tǒng)、深拖系統(tǒng)及合成孔徑聲納系統(tǒng)的技術(shù)性能對比[J].武漢理工大學(xué)學(xué)報:交通科學(xué)與工程版,2012,36(1):82-86.
[14]牟健,賀惠中,姜峰.SHADOWS合成孔徑聲納系統(tǒng)及性能測試[J].中國海洋大學(xué)學(xué)報,2011,41(7/8):159-163.
[15]徐國強(qiáng),亓發(fā)慶,闞長賓,等.淺海海底管道探測技術(shù)探討[J].海岸工程,2013,32(2):20-29.
[16]徐繼尚,李廣雪,曹立華,等.海底管道綜合探測技術(shù)及東方1-1管道不穩(wěn)定因素[J].海洋地質(zhì)與第四紀(jì)地質(zhì),2009,29(5):43-50.
[17]劉昆,牟健,謝敬謙,等.淺析SHADOWS合成孔徑聲納的數(shù)據(jù)成像處理技術(shù)[J].海洋技術(shù),2013,32(2):56-72.
原標(biāo)題:于灝等合成孔徑聲納技術(shù)在海底管道探測中的應(yīng)用進(jìn)展(轉(zhuǎn)載) 來源:http://www.xiaokcehui.com/?post=37